Réglage de la hauteur de broche
Réglage de la hauteur de broche
La correction de la hauteur de broche est obligatoire après avoir remplacé la broche (lien). Il peut également être nécessaire de vérifier cette hauteur après une collision ou en cas de problèmes liés à la précision d'usinage dans l'axe Z.
Prérequis
3. Les axes doivent être activés.

4. L'autorisation d'ouverture des portes entre les opérations doit être activée.
Précautions
Ne pas faire tourner la broche
Ne pas lancer de programmes en automatique, rester dans le mode manuel.
Conserver des vitesses d'avances très faibles
Ne pas comprimer le capteur BMM20 de plus de 2mm (course maxi)
Marche à suivre
1. Effectuer une prise de référence initiale.
2. Ouvrir la porte de la zone d'usinage et installer le capteur BMM20 sur une palette mesurée. Tester le capteur en appuyant légèrement sur sa face supérieure; le témoin vert doit s'allumer.

3. S'assurer qu'aucun outil ne soit installé en broche, le tirant de la broche doit être désactivé (rétracté), la palette doit être verrouillée sur le berceau et le capteur installé, centré sur la palette, les axes X et Y doivent être au centre.
4. Fermer la porte et descendre l'axe Z en mode manuel par pas de 0.1mm jusqu'à l'activation du capteur (témoin vert).
5. Régler le pas d'avance à 0.01mm et remonter jusqu'à la désactivation du capteur.
6. Régler le pas d'avance à 0.001mm et descendre jusqu'à l'activation du capteur.
7. Relever la valeur affichée.
Calculer la correction de hauteur:
Valeur mesurée - Hauteur BMM20 - Hauteur palette mesurée = Correction
Ex:
8. Ouvrir une copie de la solution correspondant au système cible.
Note: Afin de conserver un historique des versions, respecter la méthode suivante:
8.1. Repérer la solution correspondante au système cible dans sa dernière version.
8.2. Créer une copie du dossier complet.
8.3. Renommer ce dossier en y ajoutant la date du jour.
8.4. Ouvrir cette solution et apporter les modifications.
8.5. Enregistrer la solution et si nécessaire, compléter les notes de version
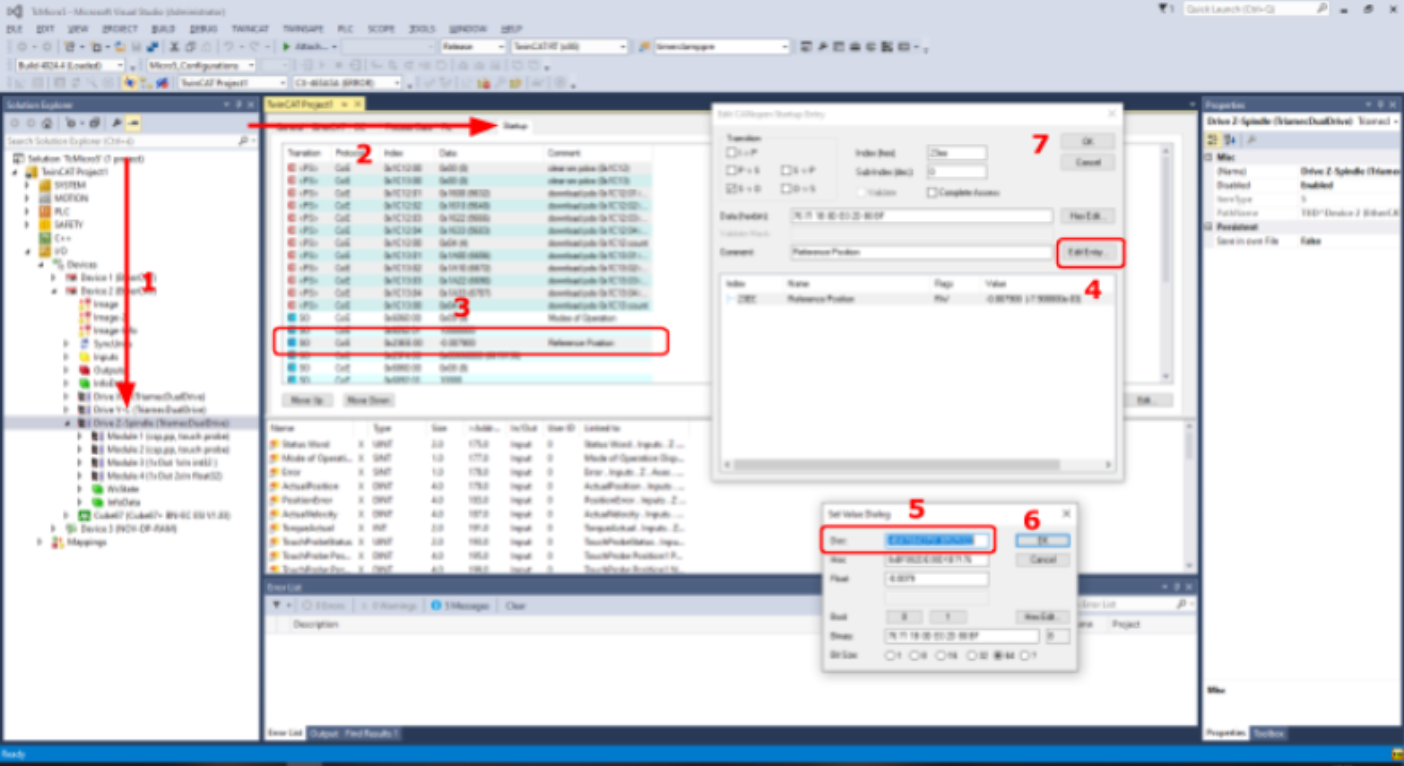
9. Entrer la valeur dans TwinCAT
9.1. Arborescence: TcMicro5 --> TwintCAT Project1 --> I/O --> Devices --> Device 2 (EtherCAT) --> Drive Z-Spindle (TriamecDualDrive) --> Double-clic
9.2. Onglet "Startup"
9.3. Index 0x23EE:00 --> Double-clic
9.4. Cliquer sur "Edit Entry..."
9.5. Entrer la valeur en décimal (ne pas prêter attention à la valeur en cours dans ce champ)
9.6. Valider
9.7. Valider
10. Activer la configuration sur l'API.
11. Sauvegarder le programme.
12. Usiner une pièce de test et ajuster la correction si nécessaire.
Il n'y a aucun commentaire pour le moment.